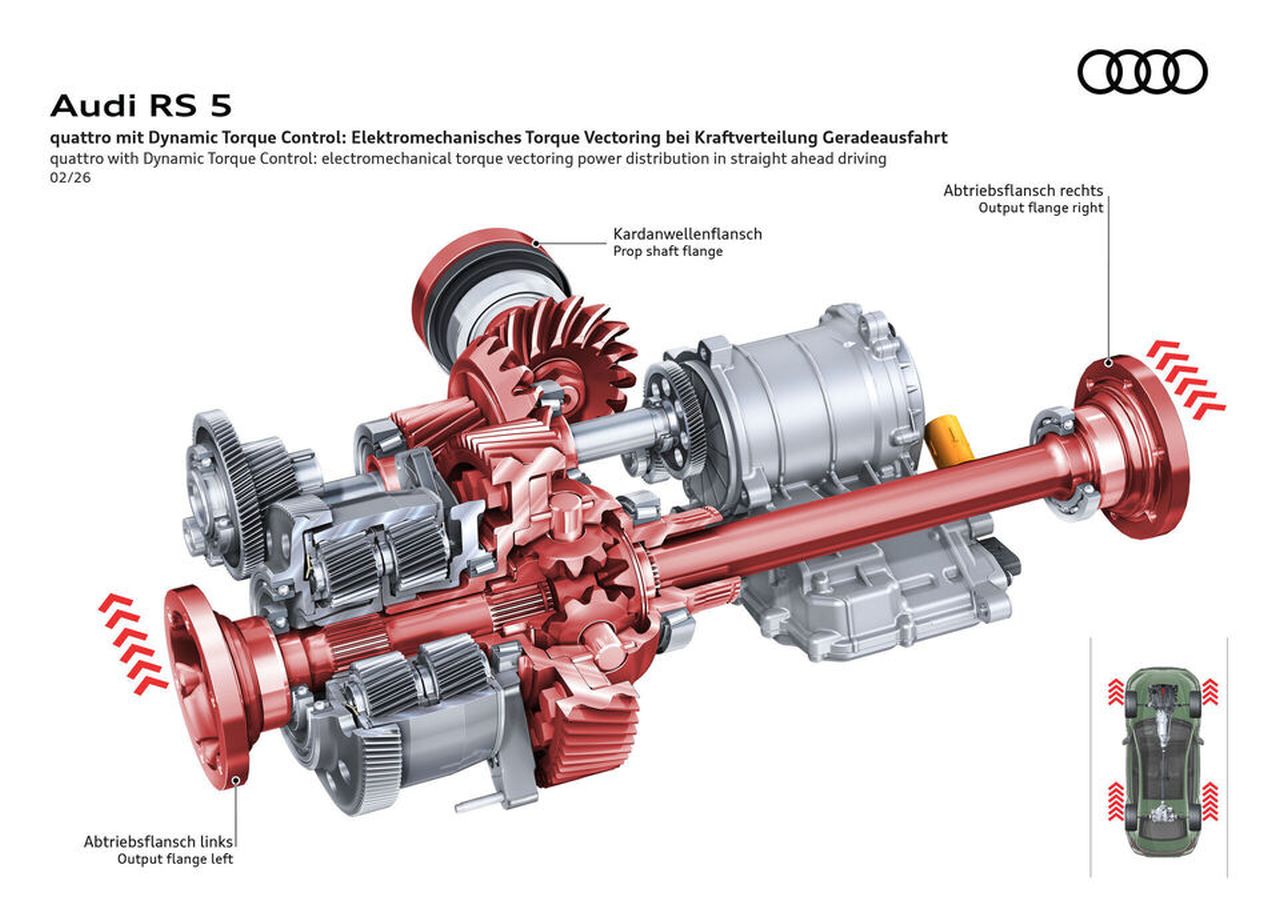
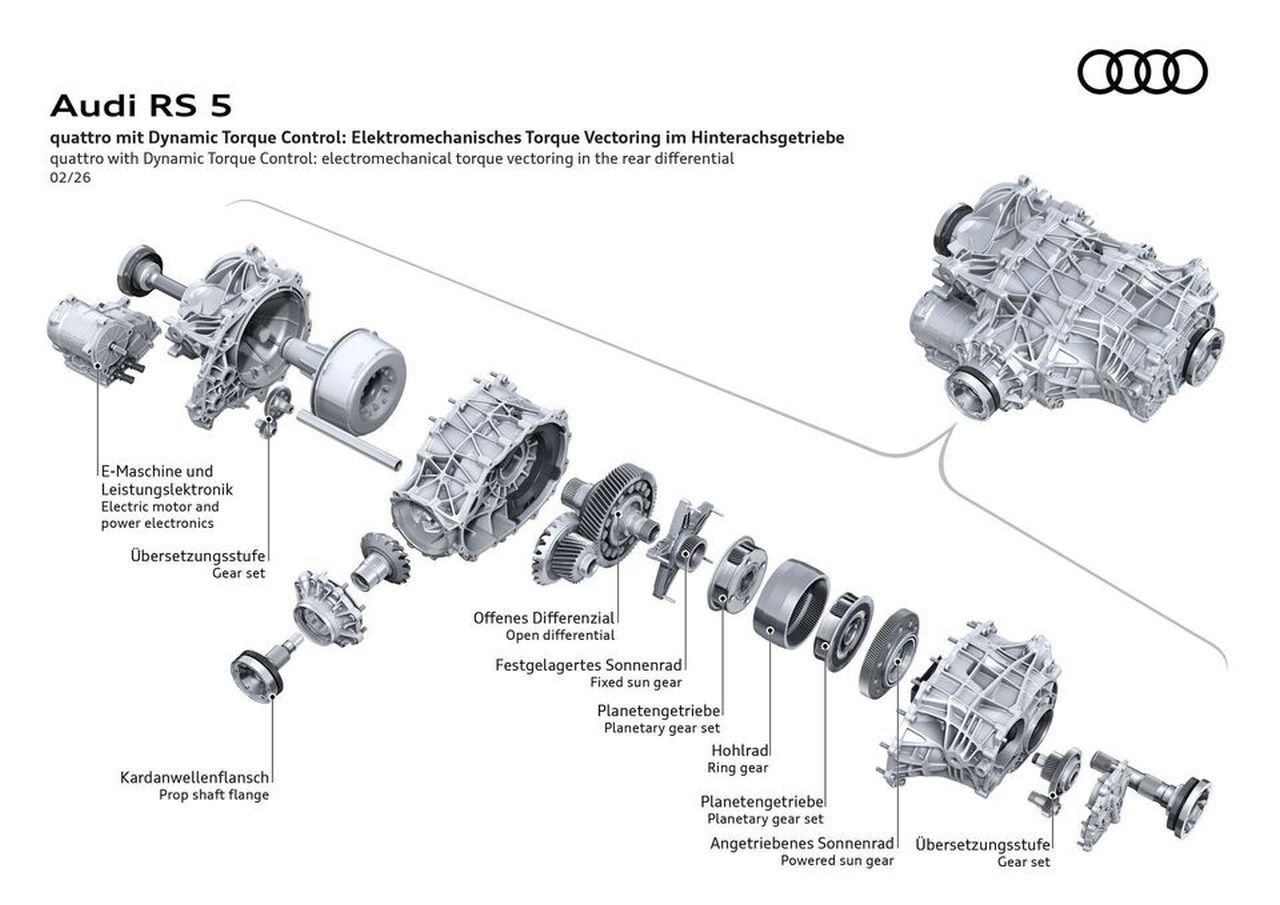
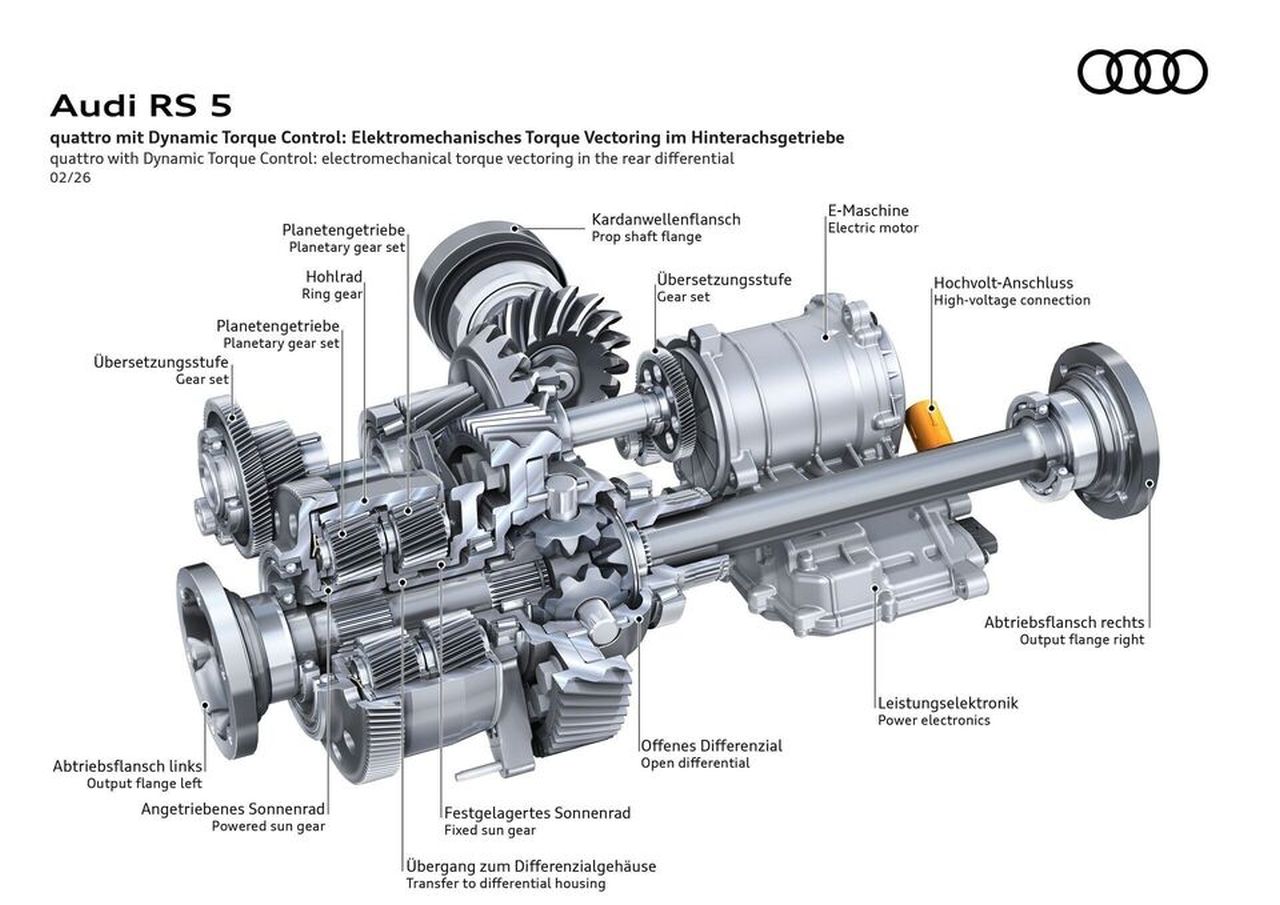
Základ je nová zadná náprava typu transaxle s elektromotorom
V nej Audi integruje vysokonapäťový elektromotor s výkonom 8 kW a krútiacim momentom 40 Nm. Ten nie je určený na pohon. Funguje ako aktívny prvok riadenia rozdelenia krútiaceho momentu medzi zadné kolesá. V kombinácii s overdrive prevodmi a diferenciálom s nízkou svornosťou dokáže systém presúvať rozdiel krútiaceho momentu až do úrovne 2 000 Nm medzi ľavým a pravým kolesom, a to v extrémne krátkom čase – približne 15 milisekúnd. To je rádovo rýchlejšie než reakcie klasických mechanických systémov.


Zásadný rozdiel oproti doterajším riešeniam spočíva v tom, že elektromechanické torque vectoring funguje nezávisle od zaťaženia pohonu. Kým tradičné spojkové systémy dokážu aktívne rozdeľovať výkon najmä pri akcelerácii, nové riešenie od Audi pracuje aj pri brzdení alebo úplne bez plynu. To znamená, že zásah do správania auta prichádza už pri nájazde do zákruty, nielen pri jej výjazde. V praxi tak systém dokáže aktívne potláčať nedotáčavosť presmerovaním výkonu na vonkajšie koleso alebo stabilizovať pretáčavosť zvýšením momentu na vnútornom kolese.
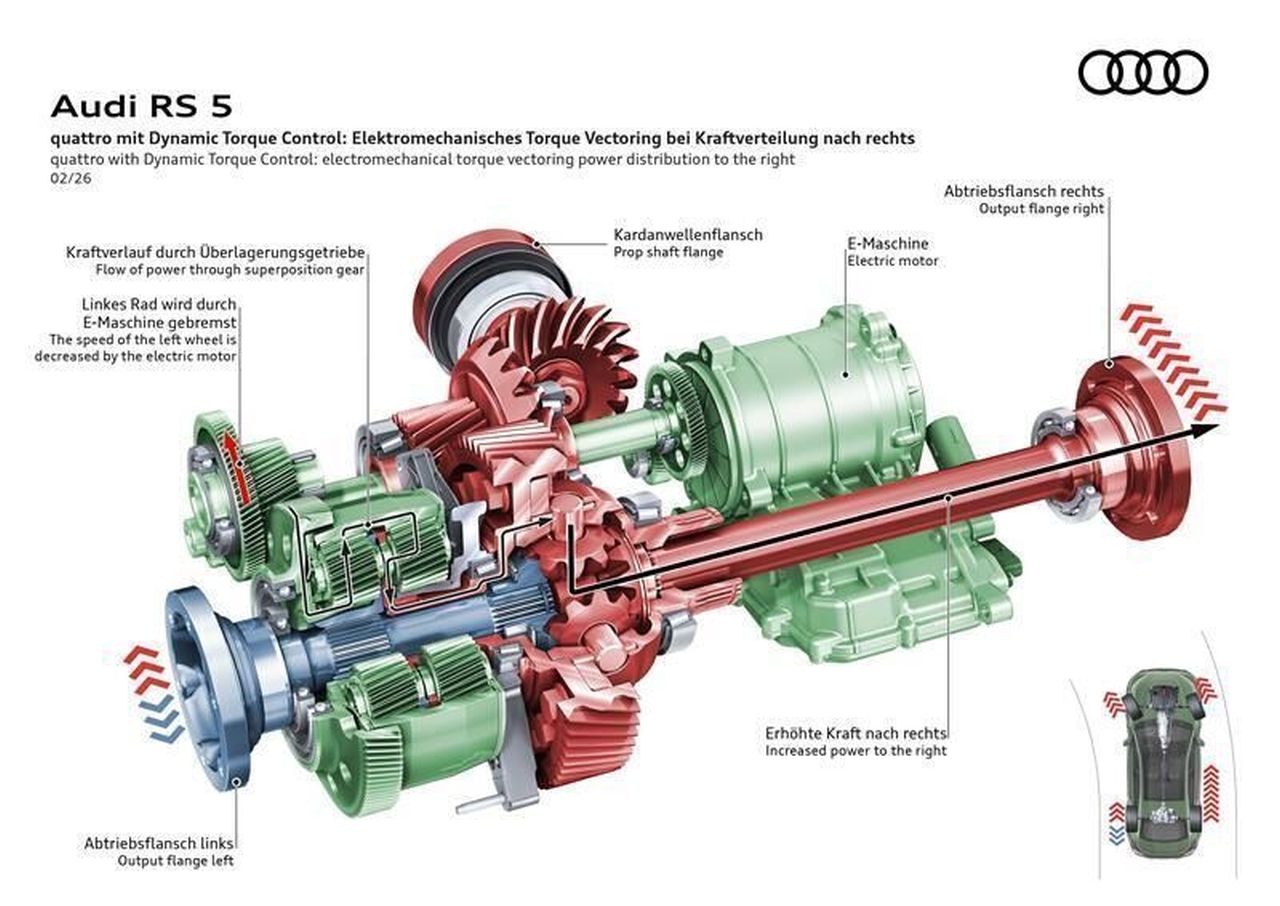
Zaujímavý detail je samotné konštrukčné riešenie
Elektromotor je umiestnený na ľavej strane nápravy, a ak je potrebné preniesť viac momentu na pravé koleso, systém využíva diferenciál ako medzistupeň. Aj napriek tejto „okľuke“ ostáva reakcia mimoriadne rýchla a presná, čo podčiarkuje vysokú úroveň integrácie mechaniky a elektroniky.
Celý systém riadi centrálna výpočtová platforma HCP1
Združuje kontrolu pohonu aj podvozka. Táto jednotka nepracuje len s aktuálnymi dátami o stave vozidla, ale dokáže aj interpretovať vstupy vodiča, najmä pohyby volantu. Rozlišuje pritom medzi rôznymi jazdnými situáciami. Napríklad medzi rýchlou korekciou šmyku a dynamickým nájazdom do zákruty, podľa toho upravuje správanie systému. Výsledkom je okamžitá reakcia vozidla, ktorá má pôsobiť prirodzenejšie napriek vysokej miere elektronických zásahov.

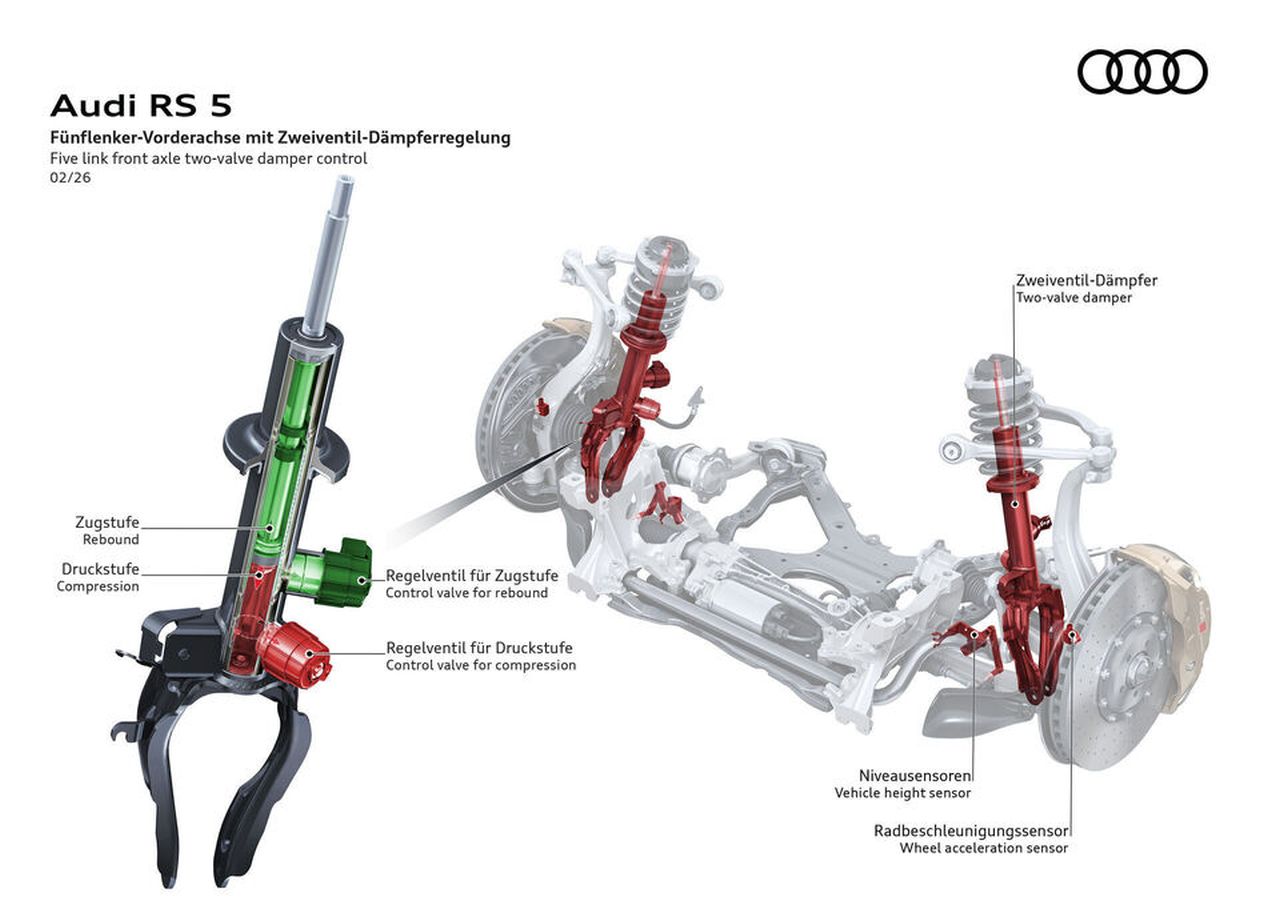
Electromechanické torque vectoring nefunguje izolovane
Na prednej náprave ho dopĺňa elektronická uzávierka diferenciálu a brake torque vectoring, zatiaľ čo adaptívne tlmiče s dvojventilovou technológiou zabezpečujú kontrolu pohybov karosérie. Všetky tieto systémy sú navzájom prepojené a kalibrované tak, aby spolupracovali v reálnom čase. Audi zdôrazňuje najmä rýchlosť prechodov medzi brzdou a akceleráciou, kde má RS 5 reagovať mimoriadne pohotovo.
Z pohľadu vodiča má byť výsledkom výrazne vyššia kontrola nad vozidlom, najmä v limitných situáciách. Auto má reagovať presnejšie, byť čitateľnejšie a zároveň ponúknuť širší rozsah jazdných charakterov. Od neutrálneho nastavenia až po výrazne agilný, zadnokolkový prejav. Otázkou však ostáva, do akej miery ide ešte o „mechanický“ zážitok a do akej miery už o riadený algoritmus. S rastúcou komplexnosťou systému rastie aj jeho hmotnosť a potenciálna náročnosť na údržbu, čo môže byť v dlhodobom horizonte nevýhodou.

Audi novým systémom quattro posúva hranice
Nové riešenie torque vectoringu ukazuje, kam sa budú športové autá uberať, smerom k vyššej integrácii elektrifikácie, softvéru a aktívneho riadenia dynamiky. Otázkou už nie je, či to funguje, ale či to vodiči budú vnímať ako zlepšenie, alebo ako stratu mechanickej autenticity.