Autonómne riadenie potrebuje softvérové a hardvérové zábezpeky. V prípade softvéru sú nutné dva samostatné systémy, kde jeden môže naplno prevziať úlohu druhého. Na strane hardvéru je napríklad nutné mať dva motory riadenia, ktoré sa v prípade poruchy navzájom nahradia.
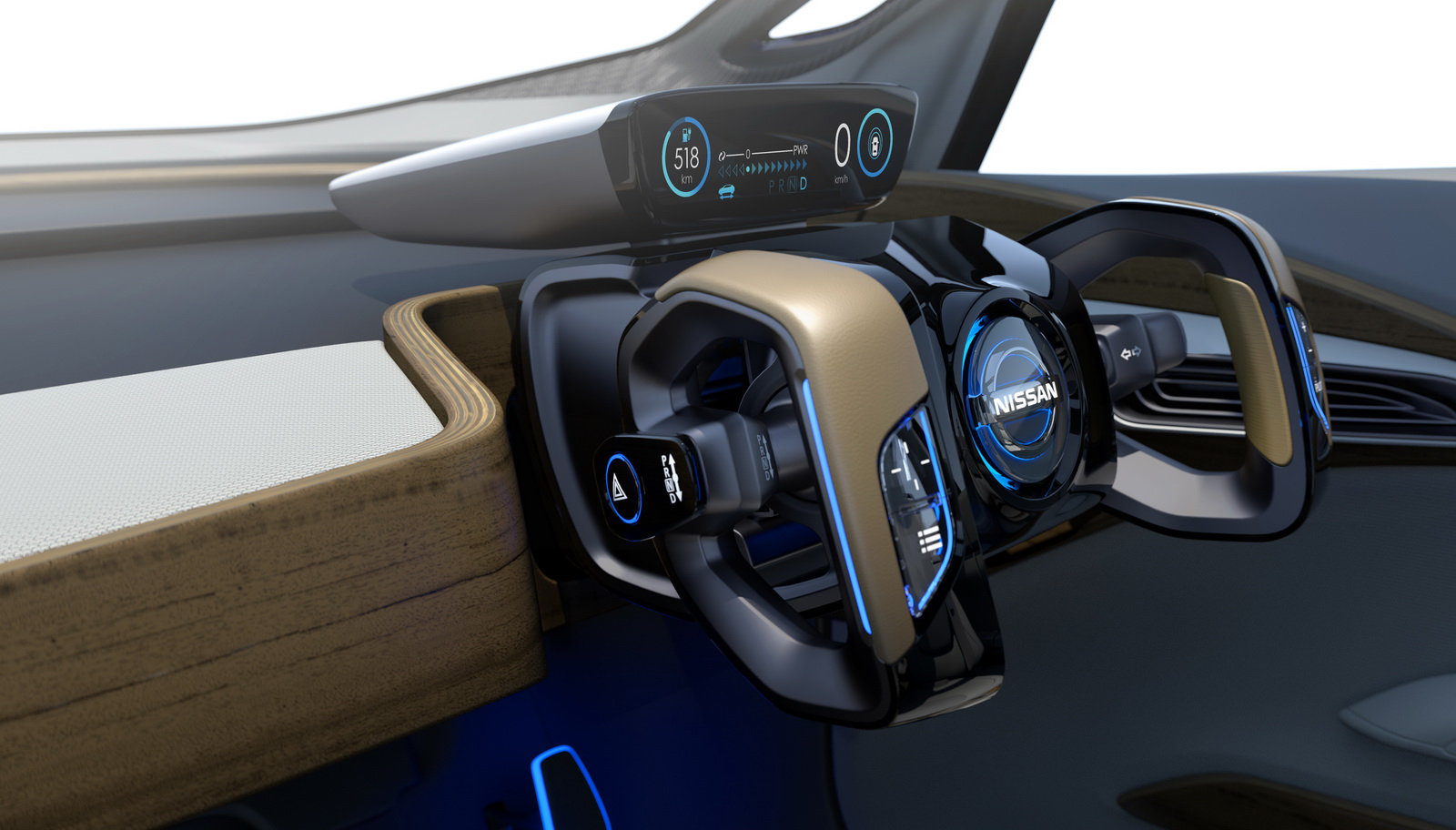
Takto si volant budúcnosti predstavujú dizajnéri v Nissane (koncept Nissan IDS)


JTEKT začne v priebehu najbližších rokov vyrábať nový druh riadenia určený pre polo-autonómne autá. Prevratnými oblasťami budú redundantné systémy riadenia a steer-by-wire (volant a kolesá bez mechanického prepojenia).
Redundantný systém riadenia si predstavte ako poistku, ktorá v autonómnom aute zasiahne, keď zlyhá hlavný riadiaci systém. Pre bezpilotné auto to bude zásadná téma, pretože ak zlyhajú systémy vozidla, tak hrozí nehoda. Redundantný systém by sa však mal bezpečne postarať o prebratie riadenia a posádka auta sa tak môže venovať iným činnostiam. „To je význam autonómneho jazdenia,“ hovorí Tetsuo Agata, šéf JTEKT. „Ak chytáte volant, ste redundantný systém,“ vysvetľuje.
Autonómne riadenie potrebuje softvérové a hardvérové zábezpeky. V prípade softvéru sú nutné dva samostatné systémy, kde jeden môže naplno prevziať úlohu druhého. Na strane hardvéru je napríklad nutné mať dva motory riadenia, ktoré sa navzájom nahradia. „Musíme dokončiť systém riadenia s týmito redundanciami,“ dodáva Agata, ktorý by rád videl funkčný produkt už v priebehu budúceho roka.
JTEKT sa chce následne zamerať aj na systémy steer-by-wire. Tie zrušia priame mechanické prepojenie volantu a kolies. Namiesto toho budú senzory snímať uhol natočenia volantu a elektromotory následne točiť kolesami. Toto riešenie prinesie voľnosť dizajnérom pri navrhovaní kabíny auta. Volant totiž nebude musieť byť na tradičnom mieste (ak tam vôbec bude) a tak sa môžu odviazať pri navrhovaní interiérov. Podľa konceptov sa bude kabína pravdepodobne viac podobať na dnešné obývačky, než súčasne autá.
Zdroj: autonews